
5 March 2026: The default branches for Regina's GitHub repositories have been renamed from master to main. You can update each of your local clones by running:
git branch -m master main
git fetch origin
git branch -u origin/main main
git remote set-head origin -a
30 November 2025: Regina 7.4.1 is out! This is a service release, and includes an important bugfix regarding triangulated boundary components. Read about the changes, or just go ahead and download it.
29 August 2025: Regina 7.4 is out! This is a big one. Read all about what's new here.
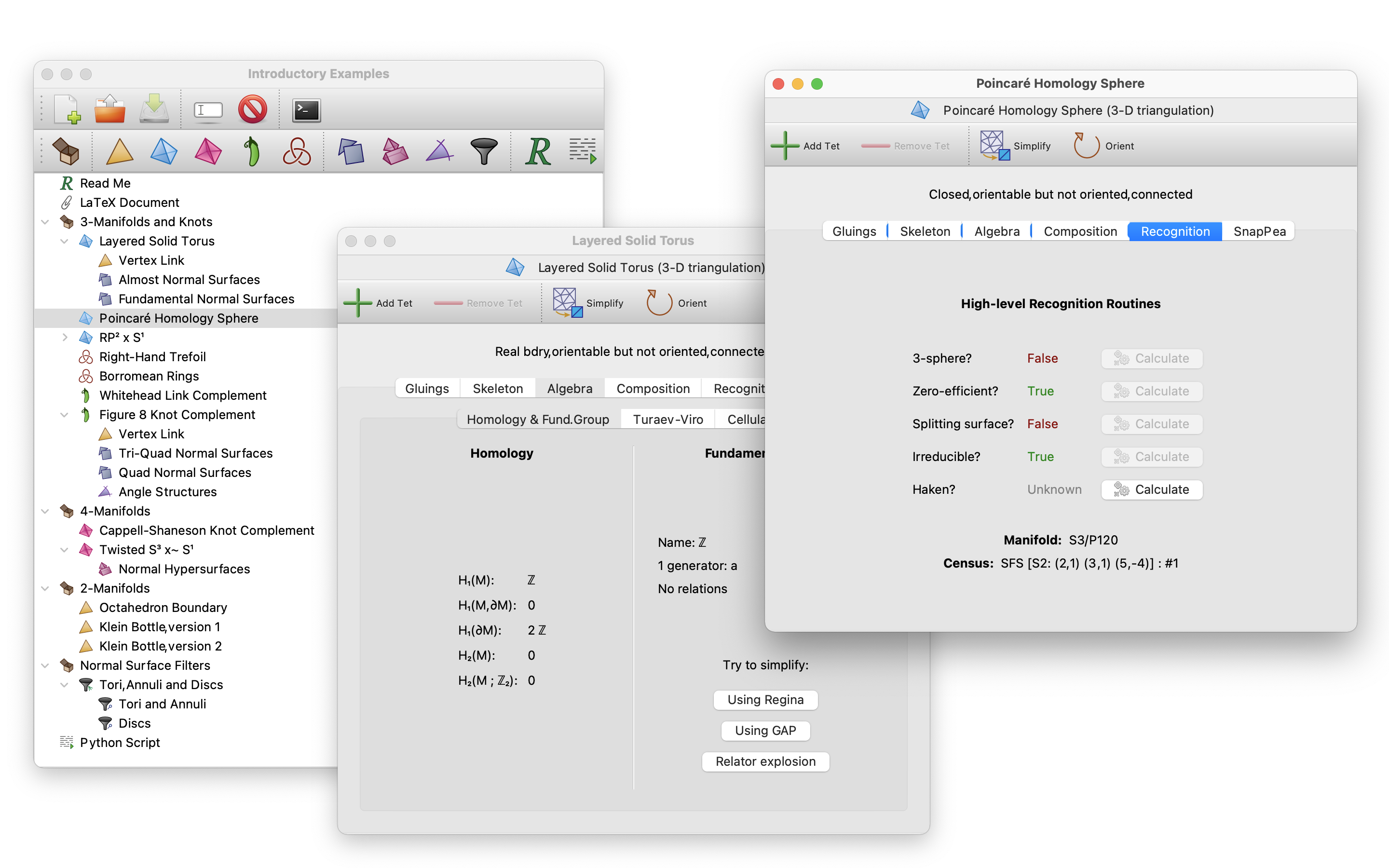
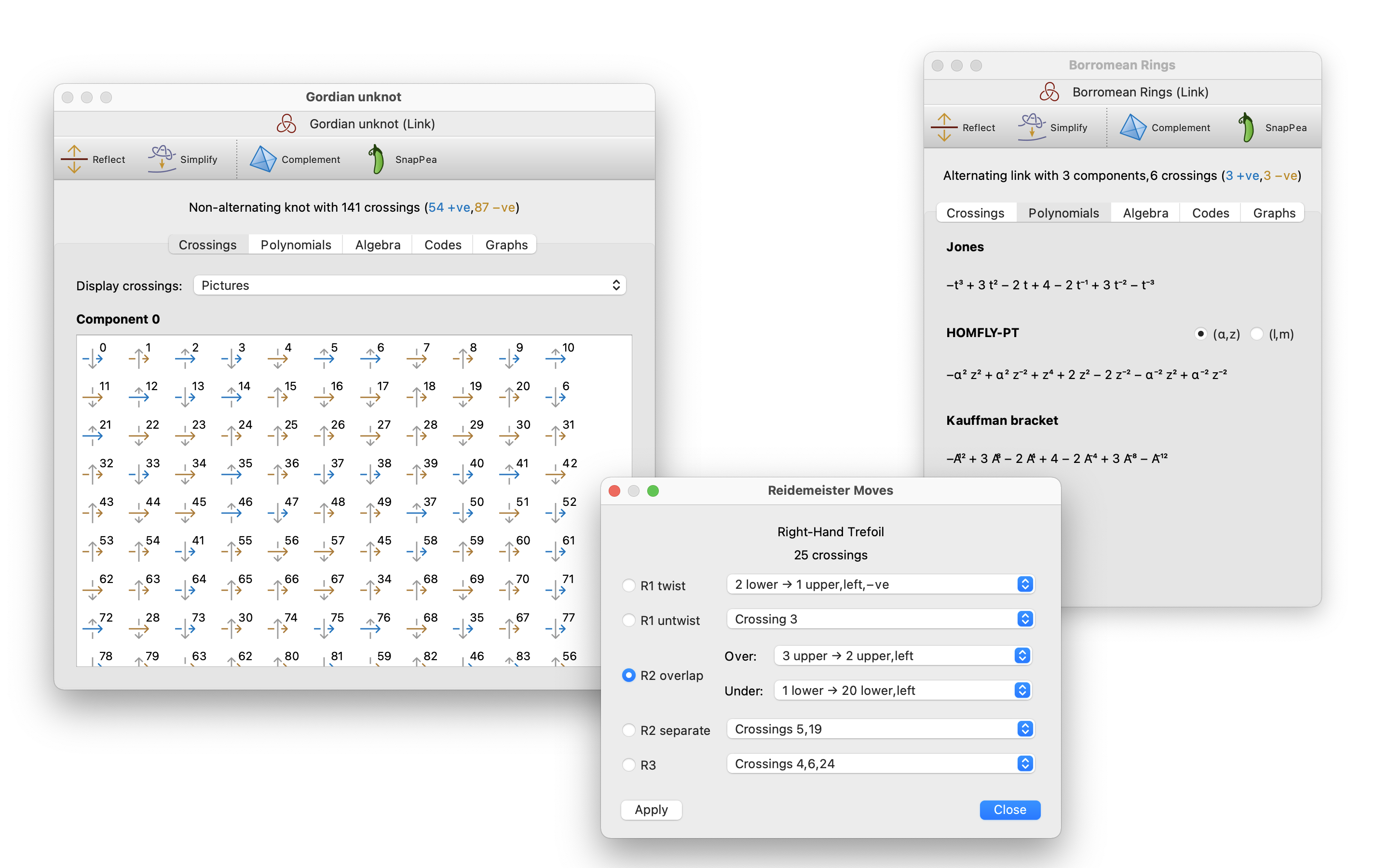
For 3-manifolds, it includes high-level tasks such as 3-sphere and unknot recognition, connected sum decomposition and Hakenness testing, comes with a rich database of census manifolds, and incorporates the SnapPea kernel for working with hyperbolic manifolds. For 4-manifolds, it offers several combinatorial and algebraic tools, as well as support for normal hypersurfaces. For knots and links, Regina can perform combinatorial manipulation, compute knot polynomials, handle virtual knots and links, and work with several import/export formats.
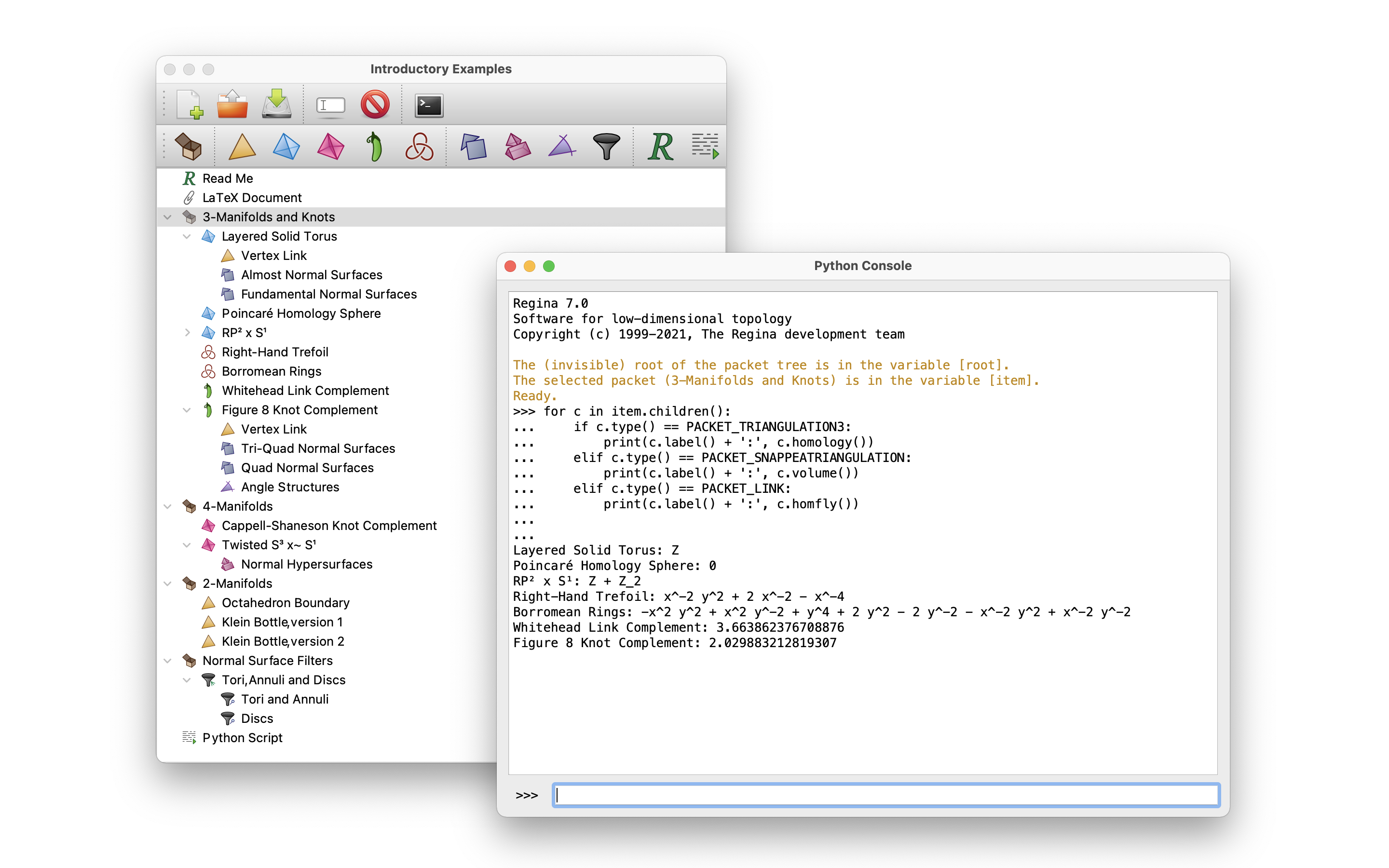
Regina comes with a full graphical user interface, as well as Python bindings and a low-level C++ programming interface.
See the users' handbook for a detailed list of features.
 |
 |
| Studying 3-manifold triangulations |
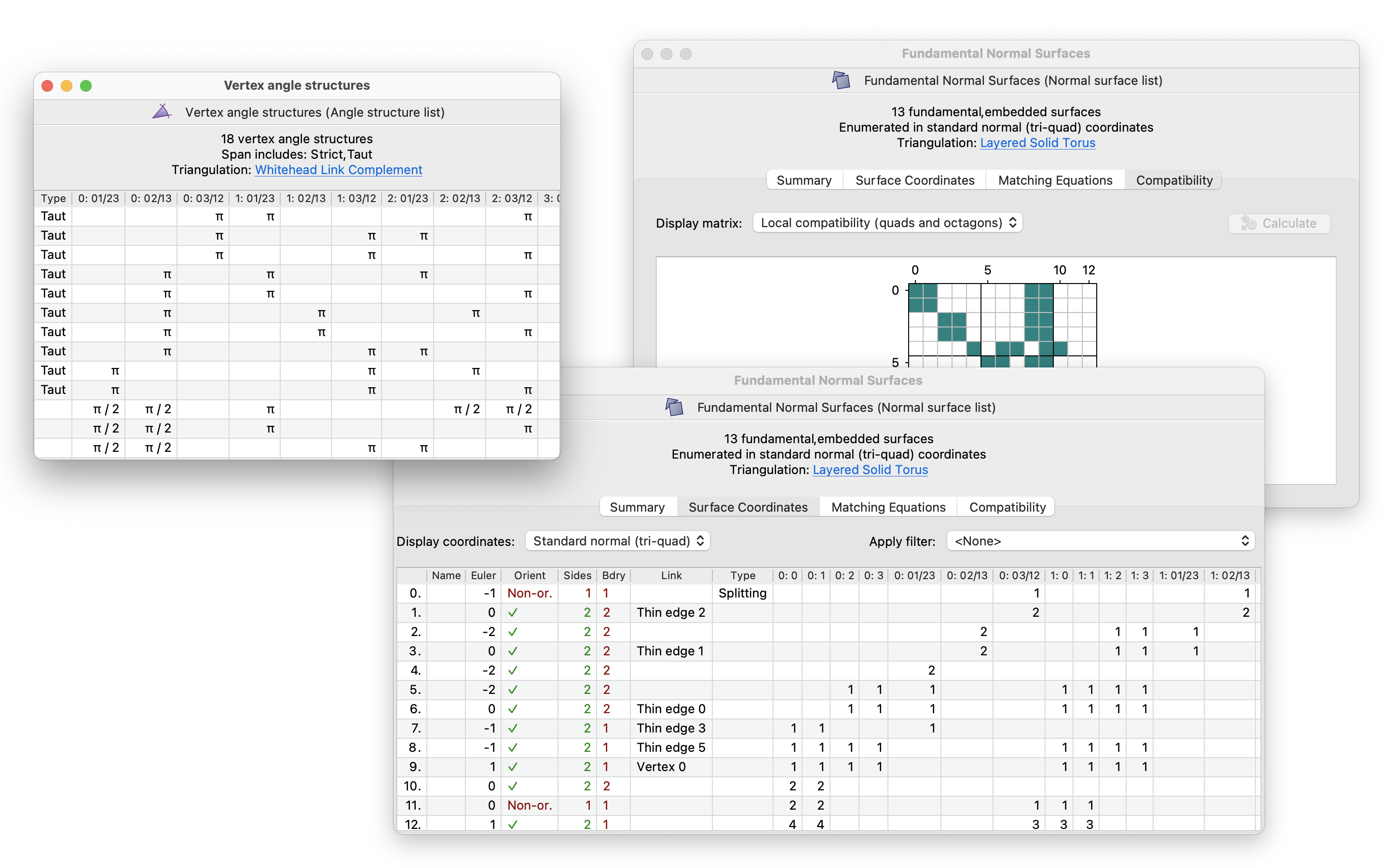
Normal surfaces and angle structures |
 |
 |
| Knots and links |
In-built Python scripting |
The following downloads are available:
|
All direct downloads come with SHA-1 checksums and SHA-256 checksums, signed with Ben Burton's GPG key.
If you encounter any problems when you run Regina, you can check the
troubleshooting page to
see if your problem is discussed there. You also most welcome
to contact us for help.
Mac
Regina runs natively on both Intel and Apple Silicon machines.
It ships with its own copy of Python 3, which is bundled inside
Regina's macOS app.
You can download Regina either from this website, or via the App Store (for free of course). Not sure which? Start with the App Store version (but read below).
macOS version Website download App Store Tahoe (26)
Sequoia (15)
Sonoma (14)Download here
There are some minor differences between the website and App Store versions. The App Store version:
Sandboxing is a security measure that comes with all App Store downloads: it ensures that apps only access files that you explicitly choose through the graphical file dialogs (Open, Save, etc.). For Regina, this means that when you open a Python console or run command-line tools (regina-python, regfiledump, etc.), the only personal files you can access are those in your Downloads folder. You can still access world-readable files, such as those in your Applications folder.
Regarding security:
Regina now only supports 64-bit Windows, and only on Intel/AMD64 chipsets (i.e., the x64 architecture). Most modern Windows installations are of this type, and this is almost certainly the version that you want.
If your machine has an ARM64 chipset (e.g., you have a Mac with Apple Silicon), you will need to run Regina under a different operating system (e.g., macOS or GNU/Linux).
Windows version Architectures Installer Windows 11
Windows 10x64 Download
Regarding security:
For instructions on setting up Regina's package repositories, click on the Install link for your system in the table below.
Regina's GNU/Linux packages are named regina-normal (to avoid conflicting with the other Regina).
Distribution Versions Architectures Instructions Arch Linux Rolling release x86_64 Install Debian 13.x (trixie)
12.x (bookworm)amd64
arm64
i386 (bookworm only)Install unstable (sid) Everything Fedora 43
42
41aarch64
x86_64Install openSUSE Leap 16.0
Leap 15.6aarch64
x86_64Install Ubuntu 25.10 (questing)
25.04 (plucky)
24.04 LTS (noble)amd64
arm64Install
Architectures:
For older versions of GNU/Linux:
For newer versions of GNU/Linux:
For other GNU/Linux distributions:
Regarding security:
System Instructions PyPI Install
Of course, whilst the packages are written to work with any modern version
of SageMath, your experiences might vary (particular with an older SageMath
and/or operating system). Follow the instructions link above for details.
iPad
The iPad app is currently in hiatus. It has not been updated since before the
pandemic began, and there is a lot of rewriting to do.
Hopefully Ben will have time to do this some time during 2025.
Source code
For other systems not listed above, you will need to build Regina from its source code.
You can download the source code here.
Please see the separate page on building Regina for instructions on how to build Regina and what libraries and tools you will need to have installed.
You can read the handbook from within Regina by selecting Help → Regina Handbook from the menu. You can also read it here online.
You can read the API documentation by:
This is a service release to fix some important bugs, and to support additional build environments. In particular:
In case you missed it, Regina 7.4 (August 2025) added many new features:
Also, the build requirements have changed: Regina now uses C++20 (not C++17), the GUI now requires Qt 6.x, the API docs now require Doxygen ≥ 1.9.2, and you no longer need Jansson, Popt or CppUnit.
To be notified of new releases, you can instead subscribe to Regina's releases directly on GitHub. See the Regina Handbook for details.
Many others have been of assistance with this project, be it through time, knowledge, testing or code. Please see the full list of acknowledgements in the users' handbook.
Benjamin A. Burton, Ryan Budney, William Pettersson, et al.,Or, in BibTeX:
Regina: Software for low-dimensional topology,
http://regina-normal.github.io/, 1999–2025.
@misc{regina,
author = {Benjamin A. Burton and Ryan Budney and William Pettersson and others},
title = {Regina: Software for low-dimensional topology},
howpublished = {{\tt http://\allowbreak regina-normal.\allowbreak github.\allowbreak io/}},
year = {1999--2025}}
This program is free software; you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation; either version 2 of the License, or (at your option) any later version.
Some of this code comes with additional permissions, which allow it to be distributed through online repositories such as Apple's App Store or Google Play. See the full license in the users' handbook for details.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program; if not, see https://www.gnu.org/licenses/.
For complete license details, including the full GNU General Public License and information on external software that Regina uses, see the full license in the users' handbook.
If you have written your own extensions that you think could be worth putting in the main release, please do write and let us know.
Even if you have no comments to make, it's always nice to hear from people using Regina, even if it's just to say hi. We're always interested to hear how this software is being used.
You can contact us by email: our websites are linked to our names in the author list above.







